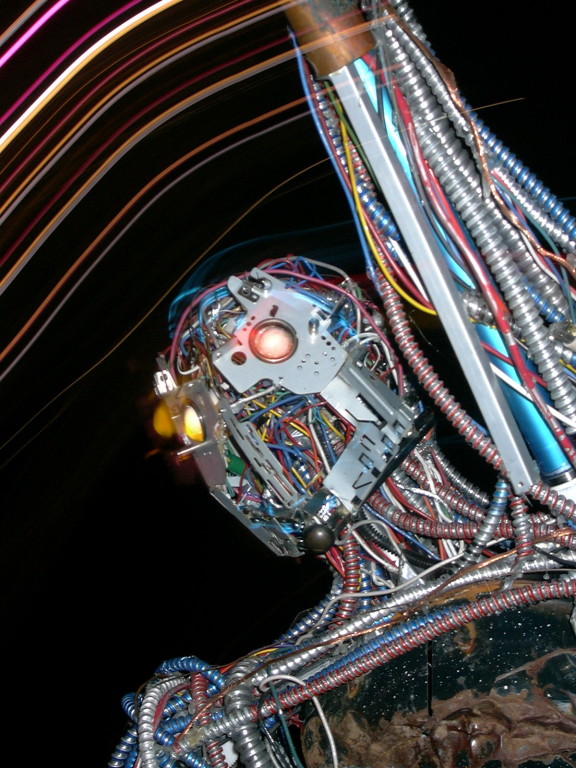
A robotic sculpture machine utilizing the Arduino micro controller to translate physical world locative data through mechanical and hydraulic means in order bring the target information back into the physical world through plotting.
 Luke A. Idziak
Luke A. Idziak